
Contenus de la page
Présentation du projet
L’idée de ce projet est de réaliser une guitare jouant automatiquement sur une corde. L’objectif est d’utiliser un bras de disque dur HDD afin de gratter la corde avec un médiator pendant qu’une pièce appuyant sur les cordes montée sur un slider choisi la note jouée.
Matériel
- Une guitare acoustique
- Une tête de lecture de disque dur HDD et ses aimants
- Un moteur stepper
- Une courroie
- 2 axes
- Un driver Microstep TB6600 pour le stepper
- Un capteur de fin de course
- Une esp32
- Un driver Arduino IBT 2 pour le bras
- Du PLA pour les impressions 3D
- Gaffer / Serres câbles / Breadboard
- Un peu d’imagination et de volonté.
Réalisation
Partie Mécanique
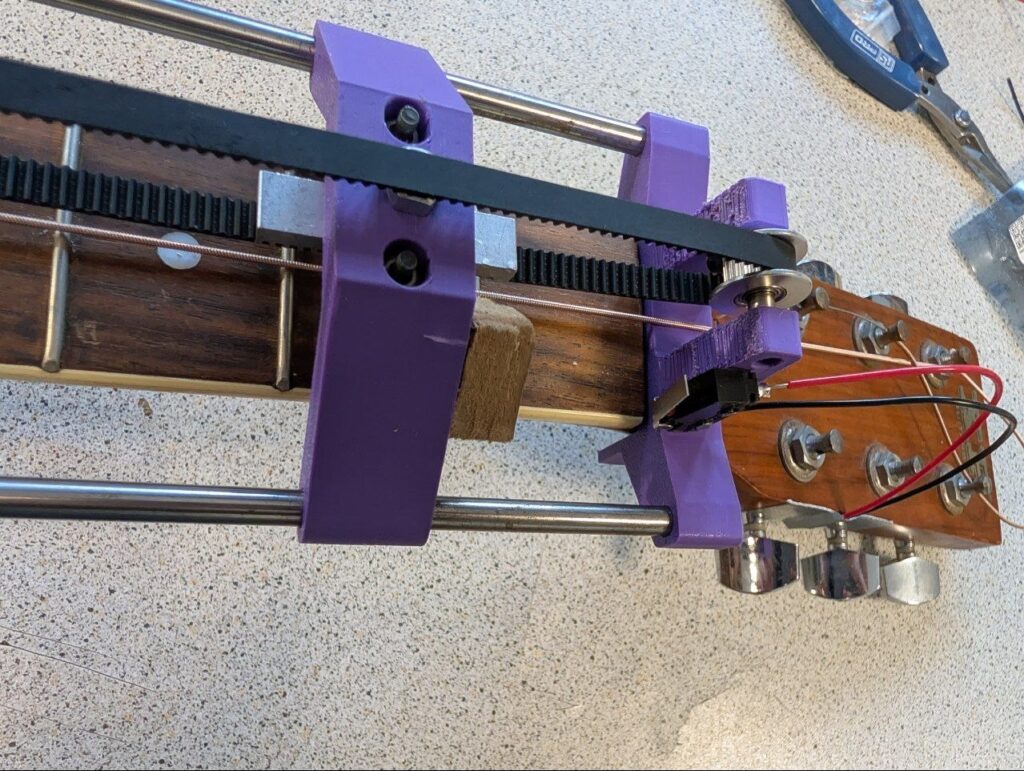
Tout d’abord nous avons du modéliser plusieurs support pour fixer tout à la guitare. Pour cela on a tout imprimé au PLA, on a dû d’abord réparer la guitare à laquelle il manquait le pont et le sillet. Ensuite les pièces importantes sont d’abord le support pour positionner le bras de HDD au dessus de la corde ainsi qu’une pièce permettant de fixer le médiator au bras. Pour ce qui concerne le slider on a des pièces pour fixer les axes ainsi que le slider en lui même.
Partie Électronique
Au niveau électrique et électronique, le projet reste simple à comprendre. La prise en main du matériel à été un peu plus complexe mais sans être impossible. Le système se base sur une ESP32 WEMOS D1 MINI, ou l’on vient brancher le reste des composants.
Le bras de disque dur fonctionnement avec un bobine et doit donc recevoir un courant continu. Pour ce faire, on utilise un IBT-2 de chez Arduino, un driver de Moteur DC. Il est un peu surdimensionné pour ce projet mais les autres drivers étaient trop faibles.
Afin de faire bouger le slider, on utilise un gros moteur stepper géré par un stepper driver microstep TB6600. On a aussi installé un capteur de fin de course en bout de manche afin de repérer le ‘0’ du slider. Il est directement relié à l’ESP.
Une particularité du montage est son fonctionnement avec plusieurs tensions d’alimentation, une à 5V pour la logique et une à 12V pour la puissance. En effet la logique de l’IBT-2, du TB6600 et de l’ESP fonctionnent en 5V. Cependant, pour augmenter le couple du moteur (pour le faire accélérer plus vite) tout en limitant le courant aux spécifications des composants, on a choisi d’alimenter les drivers en 12V. Le 24V était aussi envisageable.
Pour le moment, l’ESP est alimenté en 5V par son câble USB et fourni le 5V nécessaire au fonctionnement de la logique des autres composants. La puissance quand à elle, est fournie par une alimentation 12V. Un axe d’amélioration serait de réaliser une carte de puissance avec des bucks afin de pouvoir utiliser une batterie 12V ce qui pourrait rendre le système plus facilement déplaçable.
Partie Informatique
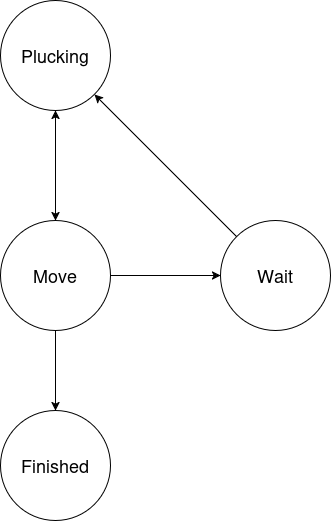
Pour le code de notre robot guitare les notes sont représentés par une fret et un temps pendant lequel la note est joué. Ensuite on a une machine à état qui alterne entre les états « plucking » où le bras frappe la corde et l’état move où le slider se déplace. Si celui-ci arrive en avance comparé à la durée de la note précédente alors on entre dans l’état « wait » et si on arrive à la fin de la mélodie on entre dans l’état « finished » et le code s’arrête. Vous trouverez ici un lien vers le github du projet.
Futur du projet
Il existe plusieurs axes d’amélioration pour ce projet :
Sur un point de vue général, un grand axe d’amélioration pourrait être l’ajout de cordes supplémentaires. Cela impliquerait de grandes complications puisque cela nécessiterait l’ajout d’un système de levé du médiator ainsi qu’un asservissement en position du bras.
Sur un point électronique, La réalisation d’une carte d’interconnexion et d’une carte de puissance permettrait une meilleure organisation du système et une meilleure portabilité avec l’ajout d’une batterie. L’utilisation d’un driver DC plus petit pourrait aussi améliorer en globalité le projet.
Sur un point Informatique, le code du projet est améliorable, que ce soit sur la partie gestion des GPIOs et des composants où il serait possible d’améliorer la précision du système, ou sur la partie soft (gestion de la musique) où l’on pourrait imaginer un algorithme permettant de jouer n’importe quelle musique donnée en fichier, pouvoir réaliser des boucles, avancer ou reculer dans la musique, l’accélérer ou la ralentir…
Sur un point Mécanique, certaines pièces sont à revoir. Au niveau des impressions 3d certaines pièces doivent être modifiées afin d’effectuer de façon plus efficace leur tâche. On pourrait citer l’ajout d’une « vrai » fixation pour le capteur de fin de course, un slider plus précis, un support bras mieux réalisé… On notera aussi que la guitare est exposé à de fortes vibrations duent au fonctionnement des différents moteurs. On pourrait imaginer une meilleure gestion vibratoire passant par l’utilisation de micros bobiné et d’un ampli afin de ne récupérer que le son des cordes.
Sur un point esthétique, l’ajout de passe câbles, et l’internalisation des composants permettrait de retrouver un look de guitare assez classique. On pourrait imaginer tirer tout les câbles directement dans la guitare.